(UIST '20) HapLinkage: Prototyping Haptic Proxies for Virtual Hand Tools Using Linkage Mechanism
Abstract
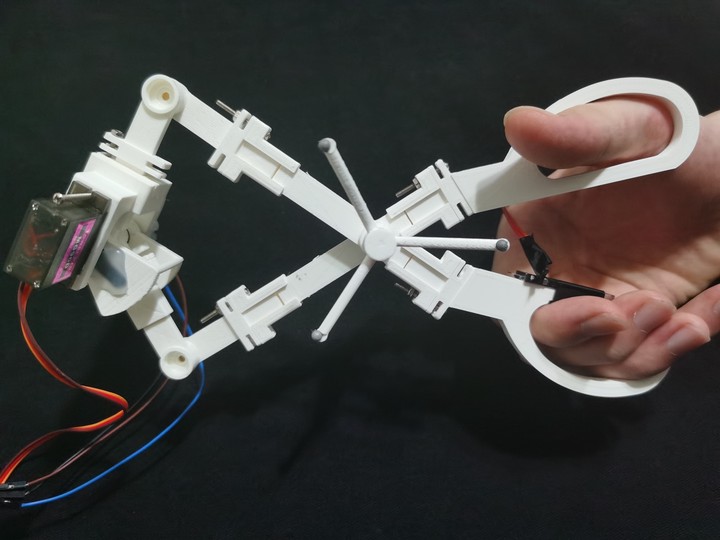
Haptic simulation of hand tools like wrenches, pliers, scissors and syringes are beneficial for finely detailed skill training in VR, but designing for numerous hand tools usually requires an expert-level knowledge of specific mechanism and protocol. This paper presents HapLinkage, a prototyping framework based on linkage mechanism, that provides typical motion templates and haptic renderers to facilitate proxy design of virtual hand tools. The mechanical structures can be easily modified, for example, to scale the size, or to change the range of motion by selectively changing linkage lengths. Resistant, stop, release, and restoration force feedback are generated by an actuating module as part of the structure. Additional vibration feedback can be generated with a linear actuator. HapLinkage enables easy and quick prototypting of hand tools for diverse VR scenarios, that embody both of their kinetic and haptic properties. Based on interviews with expert designers, it was confirmed that HapLinkage is expressive in designing haptic proxy of hand tools to enhance VR experiences. It also identified potentials and future development of the framework.